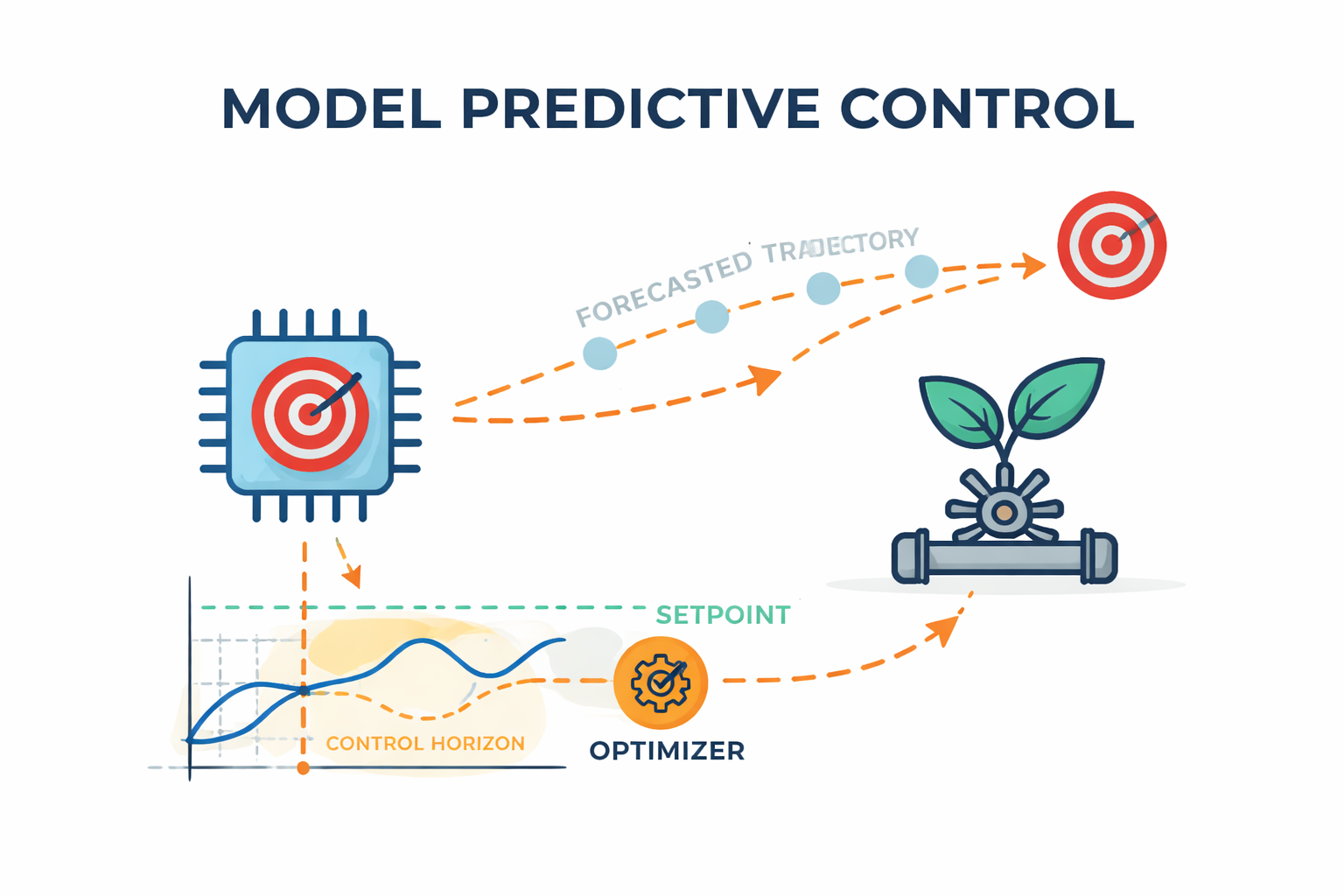
MPC-Based Moving Obstacle Avoidance with Prediction Uncertainty
MATLAB | ROS
I am a results driven mechanical engineer with a strong experience in control systems, robotics, and intelligent automation. I enjoy solving complex, real world engineering problems and turning theoretical ideas into practical, deployable solutions. My background spans programming, mechanical design, and machine learning, enabling me to work effectively across hardware and software boundaries. Before graduate school, I gained hands on experience building robotic and autonomous systems, which strengthened my ability to design, prototype, and iterate quickly. I am currently pursuing a Ph.D. in mechanical engineering, where my work focuses on improving the computational efficiency of advanced control methods. My research includes reducing the complexity of constrained zonotopes for fast reachable set computation (ZonoLab) and exactly representing model predictive control laws using ReLU neural networks.
Ph.D. in Mechanical Engineering
The University of Texas at Dallas
2024 – Present
B.E. in Mechanical Engineering
Tribhuvan University
2017 – 2022


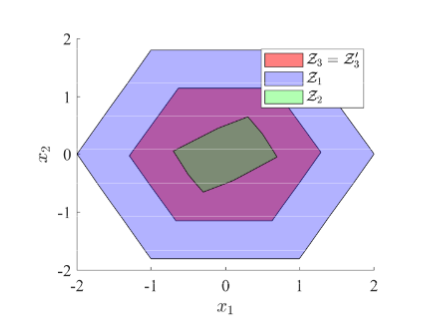
My doctoral work focuses on improving the computational efficiency and scalability of advanced control methods for real time deployment in robotics and autonomous systems. I develop exact training free representations of explicit Model Predictive Control laws using ReLU neural networks for fast online evaluation while preserving theoretical guarantees, and design algorithms for exact complexity reduction of constrained zonotopes used in reachability analysis, invariant set computation, and verification, validated on robust controllable sets and neural network induced partitions.
I support research and development activities in control systems and robotics by contributing to mathematical modeling, algorithm design, simulation, and validation, including the implementation of optimization based controllers, performance analysis of closed loop systems, and preparation of research artifacts for publication and dissemination.
I conducted research on bi fidelity transfer learning for Bayesian Neural Networks applied to vehicle suspension modeling, implementing and evaluating learning strategies that leverage low and high fidelity datasets to improve uncertainty aware modeling performance and robustness in data scarce regimes.
I led mechanical and embedded systems development for a seed bombing drone based on the DJI Matrice 300 platform by designing and fabricating custom payload and release mechanisms for controlled deployment, implementing low level control logic on STM32 microcontrollers with integrated motor control and safety interlocks, and serving as the machine learning lead for an AI based flood early warning system deployed along the Kamala River using real time hydrological data, IoT sensor networks, and long range LoRa communication.
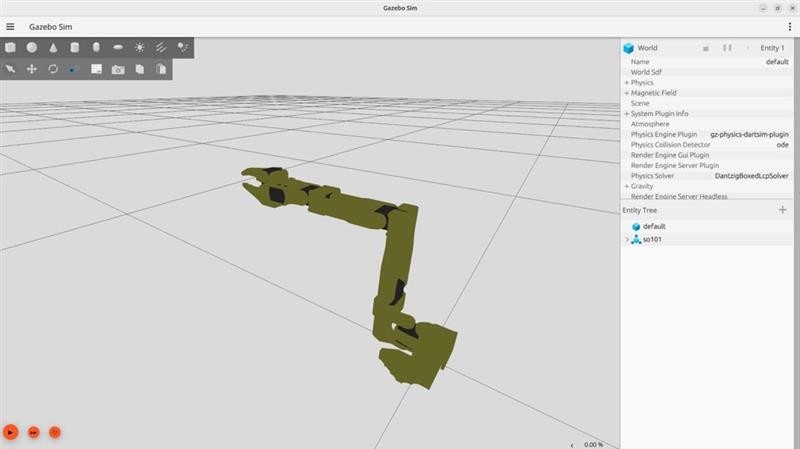
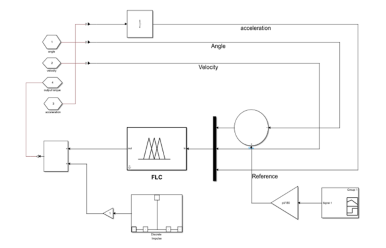
I designed and simulated a Fuzzy Logic Controller for a three degree of freedom robotic manipulator by incorporating joint acceleration as an additional input to improve tracking accuracy and robustness, validating the controller in MATLAB Simulink and ROS using a URDF model converted from SolidWorks with comparisons against classical PID control under sensor noise and aggressive trajectories, and additionally formulated and solved a mixed integer linear programming problem for optimal electric vehicle charging station placement in Kathmandu Valley using the CPLEX Python API. I also led the Autonomous Control Group at Shireto. Shireto is a student team that competes at the annual Shell Eco Marathon competitions. My team focused on autonomous control side of things focusing on use of camera and in general, sensor fusion to make the car more efficient.